Quaternions are a mathematical concept that are commonly used in computer graphics and game development to represent rotations in three-dimensional space. In this article, we will discuss how quaternions are used for position, translation, and rotation, and how game developers can avoid a phenomenon known as gimbal lock when using quaternions.
What are quaternions?
A quaternion is a mathematical object that consists of four components: a scalar (real) part and a three-dimensional vector (imaginary) part. Quaternions are similar to complex numbers, which consist of a real part and an imaginary part, but they have an additional three dimensions. Quaternions can be represented as follows:
q = w + xi + yj + zk
where w, x, y, and z are the scalar and vector components, and i, j, and k are the imaginary units. Quaternions can be used to represent rotations in three-dimensional space, as well as translations (movements) and positions.
Using quaternions for position and translation
In game development, quaternions are often used to represent the position and translation of objects in three-dimensional space. For example, the position of an object can be represented as a quaternion with the scalar component set to zero and the vector component representing the object’s coordinates in three-dimensional space. Translation can be represented as a quaternion with the scalar component set to one and the vector component representing the amount of movement in each dimension.
To move an object, game developers can simply add the quaternion representing the desired translation to the quaternion representing the object’s current position. This can be done using the following equation:
p’ = p + t
where p is the quaternion representing the object’s current position and t is the quaternion representing the desired translation.
Using quaternions for rotation
Quaternions are particularly useful for representing rotations because they can be used to represent any possible rotation in three-dimensional space. To represent a rotation, game developers can use a quaternion with the scalar component set to the cosine of the angle of rotation and the vector component set to the sine of the angle of rotation multiplied by the axis of rotation.
For example, to rotate an object by 90 degrees around the x-axis, a game developer could use the following quaternion:
q = cos(90) + sin(90)i
To apply a rotation to an object, game developers can multiply the quaternion representing the object’s current orientation by the quaternion representing the desired rotation. This can be done using the following equation:
o’ = o * r
where o is the quaternion representing the object’s current orientation and r is the quaternion representing the desired rotation.
Avoiding gimbal lock
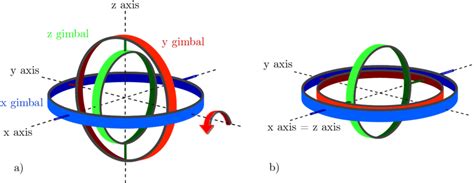
One potential issue that game developers may encounter when using quaternions for rotation is gimbal lock. Gimbal lock occurs when two of the three axes of rotation align, causing the system to become singular and unable to represent the full range of rotations. This can cause unexpected behavior in the game, such as objects flipping or rotating in unexpected ways.
To avoid gimbal lock, game developers can use alternative methods for representing rotations, such as Euler angles or rotation matrices.
In computer graphics and game development, rotations are often represented using quaternions. While quaternions are very powerful and efficient, they can suffer from a phenomenon known as gimbal lock, which can cause unexpected behavior in games. To avoid gimbal lock, game developers can use alternative methods for representing rotations, such as Euler angles or rotation matrices.
What is gimbal lock?
Gimbal lock is a phenomenon that occurs when two of the three axes of rotation align, causing the system to become singular and unable to represent the full range of rotations. This can cause unexpected behavior in games, such as objects flipping or rotating in unexpected ways.
Gimbal lock is a common issue when using quaternions to represent rotations, as quaternions are based on a system of three perpendicular axes. When two of these axes align, the system becomes unable to represent the full range of rotations.
Using Euler angles to avoid gimbal lock
One alternative to quaternions for representing rotations is Euler angles. Euler angles are a system of three angles that represent rotations about the x, y, and z axes. Euler angles can be used to represent any possible rotation in three-dimensional space.
To avoid gimbal lock, game developers can use a system of Euler angles that avoids aligning two of the axes. One such system is the yaw-pitch-roll system, which represents rotations about the y, x, and z axes, respectively. This system avoids gimbal lock because the yaw and pitch angles are not dependent on each other, so there is no risk of the x and y axes aligning.
To apply a rotation using Euler angles, game developers can simply update the angles representing the desired rotations and apply the rotations to the object. For example, to rotate an object by 45 degrees around the y-axis, a game developer could update the yaw angle by 45 degrees and then apply the rotation to the object using the updated angles.
Using rotation matrices to avoid gimbal lock
Another alternative to quaternions for representing rotations is rotation matrices. A rotation matrix is a 3×3 matrix that represents a rotation in three-dimensional space. Rotation matrices can be used to represent any possible rotation and do not suffer from gimbal lock.
To apply a rotation using a rotation matrix, game developers can multiply the matrix representing the object’s current orientation by the matrix representing the desired rotation. This can be done using standard matrix multiplication techniques.
For example, to rotate an object by 90 degrees around the x-axis, a game developer could use the following rotation matrix:
[ 1, 0, 0, 0, cos(90), -sin(90), 0, sin(90), cos(90) ]
To apply the rotation to the object, the game developer would simply multiply the object’s current orientation matrix by the rotation matrix.
In conclusion, game developers can use Euler angles or rotation matrices to avoid gimbal lock when representing rotations in computer graphics and game development. Both of these methods have their own strengths and weaknesses, and game developers should choose the method that best fits their needs.
Strengths and weaknesses of using Euler angles
Euler angles are a system of three angles that represent rotations about the x, y, and z axes. They can be used to represent any possible rotation in three-dimensional space and are relatively easy to understand and implement.
One of the main strengths of using Euler angles is that they are intuitive and easy to understand. Game developers can easily visualize rotations as a series of angles about the three axes.
However, Euler angles have several weaknesses that make them less ideal for some applications. One of the main weaknesses is that they are prone to gimbal lock, which can cause unexpected behavior in games. To avoid gimbal lock, game developers must use a system of Euler angles that avoids aligning two of the axes, such as the yaw-pitch-roll system.
Another weakness of Euler angles is that they suffer from singularities, which are points where the angles become undefined. This can cause issues when interpolating between rotations or when using Euler angles for animation.
Singularities
A singularity is a point where the Euler angles become undefined or have multiple valid solutions. Singularities occur when the orientation of an object becomes degenerate, such as when the object is pointing straight up or down. At these points, the Euler angles become indeterminate, and there is no unique way to represent the orientation of the object using Euler angles.
There are several types of singularities that can occur when using Euler angles, including gimbal lock, which occurs when two of the axes align, and axis singularities, which occur when the object is pointing directly along one of the axes.
Singularities can cause issues when interpolating between rotations or when using Euler angles for animation. At singular points, the interpolation may become undefined or jump between multiple solutions, causing unexpected behavior in the game.
To avoid singularities when using Euler angles, game developers can use a system of Euler angles that avoids aligning two of the axes, such as the yaw-pitch-roll system. Alternatively, game developers can use alternative methods for representing rotations, such as quaternions or rotation matrices, which do not suffer from singularities.
Strengths and weaknesses of using rotation matrices
Rotation matrices are 3×3 matrices that represent rotations in three-dimensional space. They can be used to represent any possible rotation and do not suffer from gimbal lock.
One of the main strengths of using rotation matrices is that they do not suffer from gimbal lock or singularities. This makes them ideal for interpolating between rotations and for use in animation.
However, rotation matrices have several weaknesses that make them less ideal for some applications. One of the main weaknesses is that they are less intuitive and more difficult to understand than Euler angles. Game developers may find it harder to visualize rotations as matrices rather than angles.
Another weakness of rotation matrices is that they are more complex to implement and require more computational resources than Euler angles. This can make them less efficient for some applications.
In conclusion, game developers can choose to use Euler angles or rotation matrices depending on their needs and the specific requirements of their application. Euler angles are easy to understand and implement, but are prone to gimbal lock and singularities. Rotation matrices do not suffer from these issues, but are more complex and less intuitive to work with.